PX4 Autopilot Release v1.13 Brings Dynamic Control Allocation
By A Mystery Man Writer
Description
PX4 Autopilot is an open-source flight control system for drones and other uncrewed vehicles. It is currently utilized in industrial drone applications and consumer drones and is the leading research platform for drones. And it is made possible by a robust community of contributors working together to improve it daily. And speaking of improving it, […]

📩 Latest from Dronecode - PX4 Autopilot V1.13 Released, Behind the Tech with Applied Aeronautics, uORB Explained Series: Part 4, UPenn drone research

Featured Post Archives - PX4 Autopilot
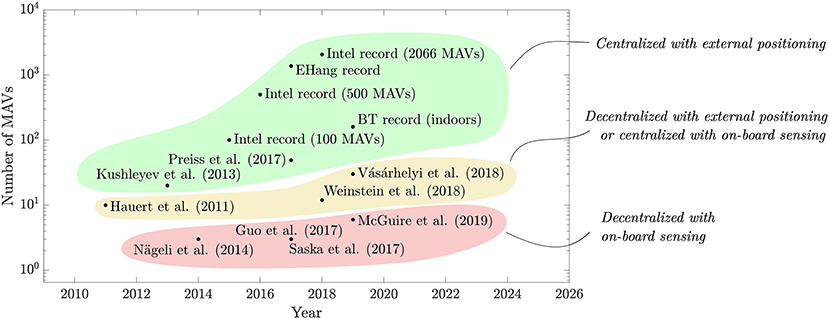
Frontiers A Survey on Swarming With Micro Air Vehicles: Fundamental Challenges and Constraints

Project Tracker] Control Allocation User experience improvement · Issue #19444 · PX4/PX4-Autopilot · GitHub

📩 Latest from Dronecode - PX4 Autopilot V1.13 Released, Behind the Tech with Applied Aeronautics, uORB Explained Series: Part 4, UPenn drone research
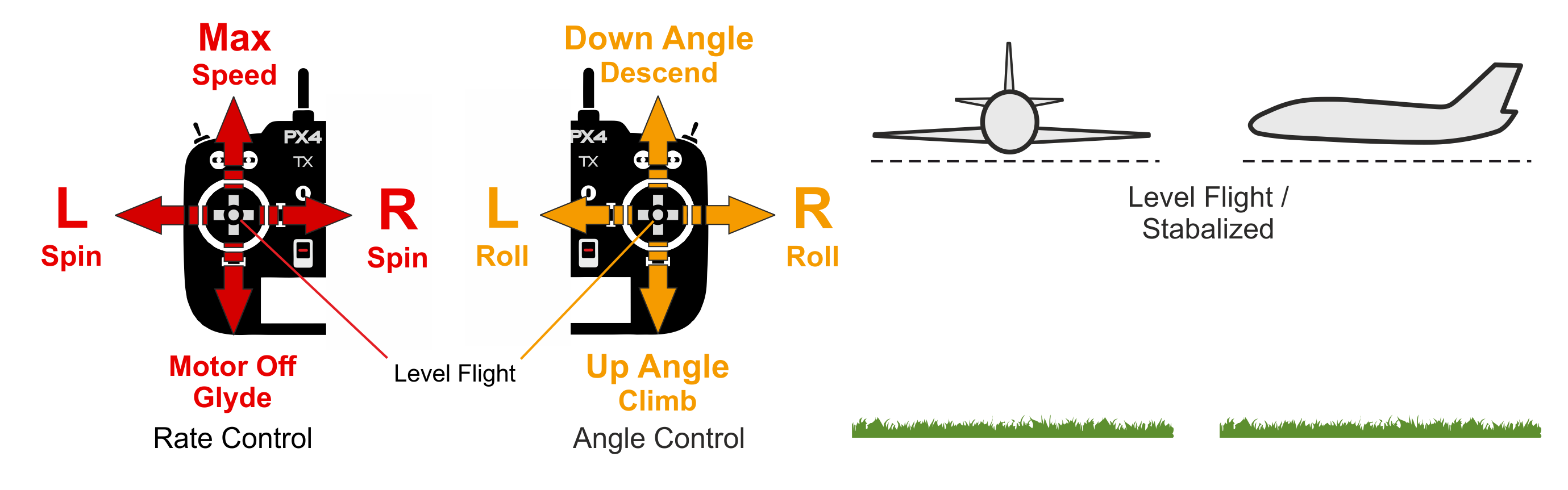
PX4 Flight Modes Overview

Dynamic Control allocation(Master branch): flight issues · Issue #19577 · PX4/PX4-Autopilot · GitHub
Featured Post Archives - PX4 Autopilot

actuator output function, how to use it ? · Issue #19190 · PX4/PX4-Autopilot · GitHub
v1.14 Release Candidate] - Flight testing & Flight Issues (logs) · Issue #21358 · PX4/PX4-Autopilot · GitHub
Automation, Free Full-Text
Automation, Free Full-Text

Ramon Roche, Author at PX4 Autopilot
CANbus for Ardupilot with UAVCAN and UC4H - CAN Devices - ArduPilot Discourse
PX4 Community Q&A: March 15, 2023 - PX4 Autopilot Coordination - Discussion Forum for PX4, Pixhawk, QGroundControl, MAVSDK, MAVLink
from
per adult (price varies by group size)